정보 2학기 수행평가2 - 원격조종 프로그래밍하기
2024.10.14 12:20
센서와 키보드 이벤트를 이용하여 코스를 이동하는 원격조정 햄스터 코딩하기. - 컴퓨터와 움직이는 물체를 연결하여 작동시키는 것을 피지컬컴퓨팅이라고 합니다.
(키보드 이벤트 예를 들면 - 시작블록에 가면 '키보드를 누르면' 블록이 있습니다. '위쪽화살표' 누르면 --햄스터직진, '왼쪽화살표' 누르면 - 햄스터 좌로 돌기, '오른쪽화살표' -- 우로 돌기, '아래화살표' -- 후진, 'a' - 90도 좌회전 이런 식으로 코딩해서 햄스터를 조종합니다.) -- 무한반복 블록은 사용하지 마세요. 다른 키보드가 말을 듣지 않습니다.
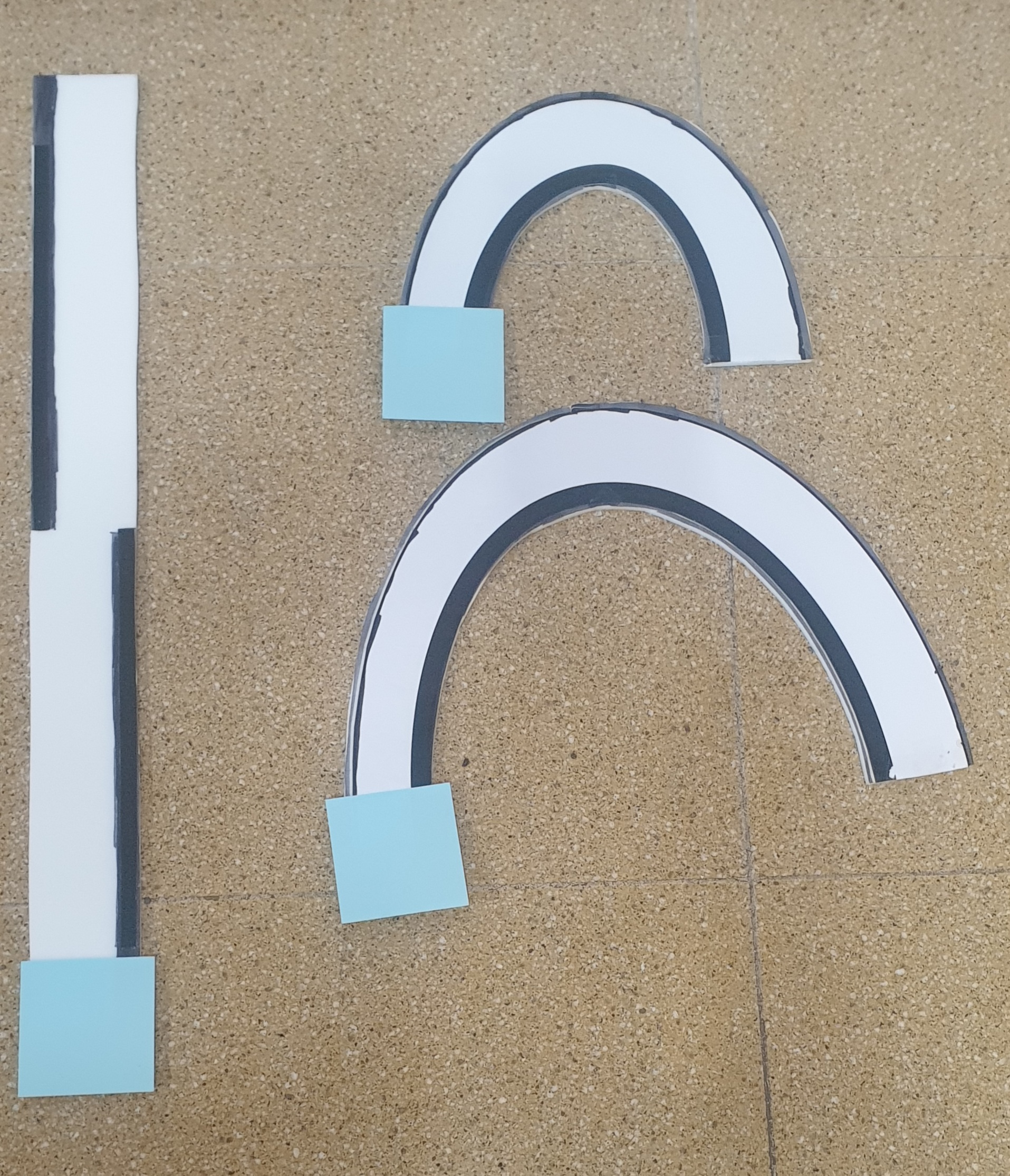
1. 폭 약 5~6센티미터의 직선도로 60센티미터 이동하기
2. 폭 약 5~6센티미터의 곡선도로 95센티미터 이동하기
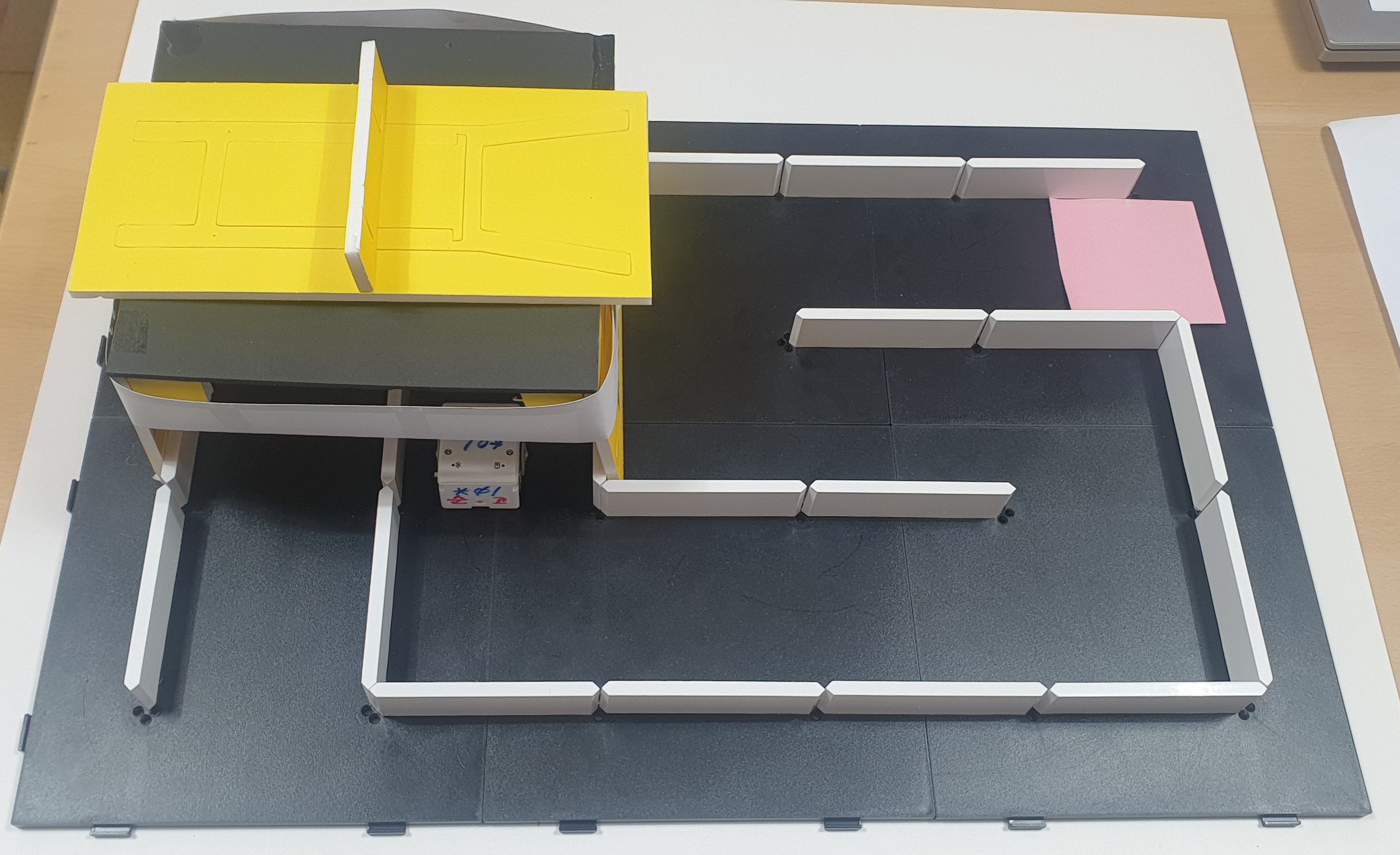
3. 폭 약 8센티미터 미로, 약 120센티미터 이동하기
세 가지 도로가 조합이 되어 시작 위치부터 ~ 도착 위치까지 이동하도록 햄스터를 조종합니다.
- 출발지에서 목적지까지 도달하는 데 걸리는 시간 측정
- 블록 수는 상관하지 않음. 가능한 모든 방법을 동원하여 최단시간에 목적지까지 햄스터가 이동하도록 하세요. (당연히 사람이 들어서 이동하는 건 아니지요~~~ ㅎ)
- 코딩 프로그램을 제출하는 시간 순서 두 가지로 차등 점수
(80 ~ 100점)
- 참가 점수 : 40점, 제출 점수 20점, 완주 점수 20점, 부분 완주 점수 5점~15점
◎ 중간에 경로를 이탈하면 직전의 재시작지점(파란 종이 위)에서 부터 계속 재출발함.
댓글 3
| 번호 | 제목 | 글쓴이 | 날짜 | 조회 수 |
|---|---|---|---|---|
| 공지 | 글쓰기권한 | 진저리 | 2019.09.04 | 4653 |
| 57 | 추가 자료-입출력장치, 소프트웨어들 [5] | 진저리 | 2024.08.18 | 354 |
| 56 | 중 정보 수행평가3 평가 문항 [1] | 진저리 | 2024.11.04 | 221 |
| 55 |
컴퓨터 하드웨어
[2] | 진저리 | 2024.10.25 | 72 |
| 54 |
시스템소프트웨어와 응용소프트웨어
| 진저리 | 2024.10.25 | 74 |
| 53 |
휴대폰 하드웨어와 소프트웨어
[4] | 진저리 | 2024.10.25 | 84 |
| 52 | 2학기 정보 수행평가 알림 [6] | 진저리 | 2024.08.18 | 270 |
| 51 |
다양한 이동 방식
[8] | 진저리 | 2024.10.05 | 222 |
| 50 | 순고 수행평가2 프로그램 기획 및 제작, 발표 [1] | 진저리 | 2024.10.18 | 91 |
| » | 정보 2학기 수행평가2 - 원격조종 프로그래밍하기 [3] | 진저리 | 2024.10.14 | 148 |
| 48 |
정보 2학기 수행평가1 장애물 피해 말판이동하기 안내
| 진저리 | 2024.10.09 | 91 |
| 47 |
보드판 이동하기 다양한 코드로 도전하기
[3] | 진저리 | 2024.09.25 | 103 |
| 46 |
2024스프레드시트 수업용 파일
[16] | 진저리 | 2024.09.25 | 156 |
| 45 |
2024 ITQ자격증반 실습파일1
[2] | 진저리 | 2024.09.21 | 121 |
| 44 | 엔트리 파일 올리기 [7] | 진저리 | 2024.09.20 | 163 |
| 43 |
엑셀 4자리 쉼표 넣기 사용자 서식
[1] | 진저리 | 2024.09.18 | 52 |
| 42 | 로봇 바퀴 파워와 속력 [2] | 진저리 | 2024.09.03 | 53 |
| 41 |
soundBONE SE01 개방형 골전도 이어폰 설명서
| 진저리 | 2024.08.30 | 50 |
| 40 |
로봇코딩 설치하기
| 진저리 | 2024.08.20 | 154 |
| 39 |
computer room
[1] | 진저리 | 2024.08.20 | 54 |
| 38 |
2024년 2학기 시간표
| 진저리 | 2024.08.14 | 59 |
직선도로 30초, 곡선도로 60초, 미로 70초 == 160초
한 구간을 세 번 코스이탈하면 부분완주로 함.